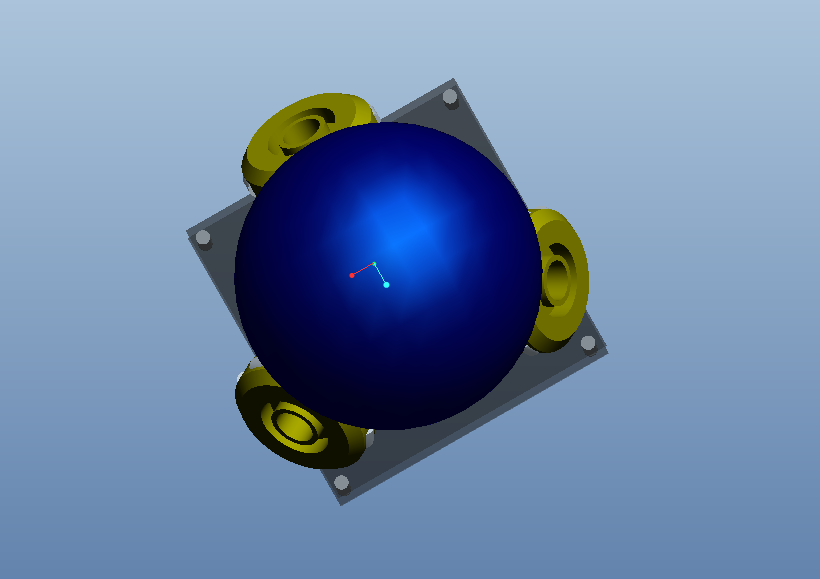
Versatility in robotics has always been an issue when using basic wheels in a linear configuration. Tank drive works well for large vehicles but it is not as effective for smaller robots that are intended to be used in tight spaces. A small robot that balanced on a ball being manipulated by three omni-directional wheels would be better suited for precision movement. This group is designing such a robot powered by three stepper motors that will balance on a rubberized bocce ball which has a diameter of roughly 4". It will be able to rotate the robot about it's center in such a way that it can change it's orientation with zero displacement due to it being symmetrical. The stepper motors being used will give control over how far the shaft rotates. This makes this robot ideal for situations requiring precision movement. An accelerometer and a gyroscope connected to an Arduino micro controller will be utilized to measure if the robot is at equilibrium and balanced and the motors will compensate when it falls from balance. The robot will be programmed in C. The geometry of the motor mounts will allow for the robot to carry a load proportional to the ball’s rigidity. This configuration is shown in the cad models featured below. The robot consists of two platforms that will be used to mount batteries, a micro controller, the sensors mentioned above, and three motors powering omni-wheels.
Another thing considered in this robot’s design is that it is easy to construct from off the shelf components and relatively cheap. The idea behind this is that it is easy to produce several of them under a reasonable budget. Some applications for this design would be that if it were sold as a kit, students and garage enthusiasts could learn how to use accelerometers, gyroscopes, and omni-wheels and learn basic programming. There is also the potential for having several of them cooperate with each other as part of swarm theory because they are cheap to produce and several of these small robots can work together to complete complex tasks. Some examples for this could be to send them out into an area that humans cannot access or it is unsafe for them to do so and search for things by equipping different sensors such as thermal sensors or video cameras to the robots.
Another thing considered in this robot’s design is that it is easy to construct from off the shelf components and relatively cheap. The idea behind this is that it is easy to produce several of them under a reasonable budget. Some applications for this design would be that if it were sold as a kit, students and garage enthusiasts could learn how to use accelerometers, gyroscopes, and omni-wheels and learn basic programming. There is also the potential for having several of them cooperate with each other as part of swarm theory because they are cheap to produce and several of these small robots can work together to complete complex tasks. Some examples for this could be to send them out into an area that humans cannot access or it is unsafe for them to do so and search for things by equipping different sensors such as thermal sensors or video cameras to the robots.


No comments:
Post a Comment