This page hosts CAD Drawings, code, modelling, etc.
The following two Images show the work we did to mathematically determine the best angle for the omni wheels to come in contact with the sphere.
 |
| Calculations to find the optimal point on the sphere where the wheels will make contact |
 |
| More calculations to find where the wheel can contact the ball |
These are our models for the omni wheel and motors we are using.
 |
| PRO/ENGINEER model of the omni wheel we are using, actual size |
 |
| PRO/ENGINEER model of the stepper motor being used |
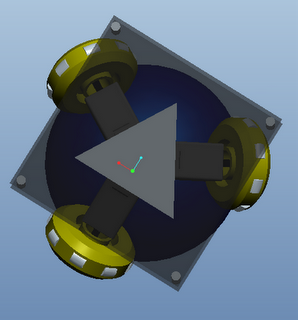
This is a preliminary model of our robot
 |
| Basic preliminary model of the robot, Side view |
 |
| Basic preliminary model of the robot, Bottom view |
|
 |
| Basic preliminary model of the robot, Topview |
|
This is an updated motor mount and is the one we are currently manufacturing. The one is the models above would not have worked due to the updated size of the stepper motors and the triangular pyramid would have been more difficult to reproduce than the current one, which is laser cut out of acrylic and then bent into shape using a heat based line bender.
 |
| Current motor mount, Side view. Notice how the mount holds the motor |
 |
| Current motor mount, bottom angled view |







No comments:
Post a Comment