Accelerometer:
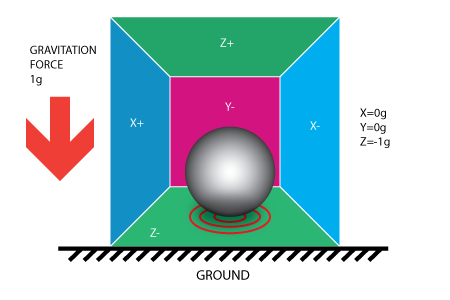
An accelerometer is a device that has the ability to measure and calculate accelerations in micro-movements. With in this device it is broken down to a simple structure that can detect three dimensions of acceleration. It is composed of springs holding together a centerpiece. When an acceleration is felt, a certain amount of voltage is generated though kinetic energy. The accelerometer has read and record the acceleration felt by the device.
Gyroscope:
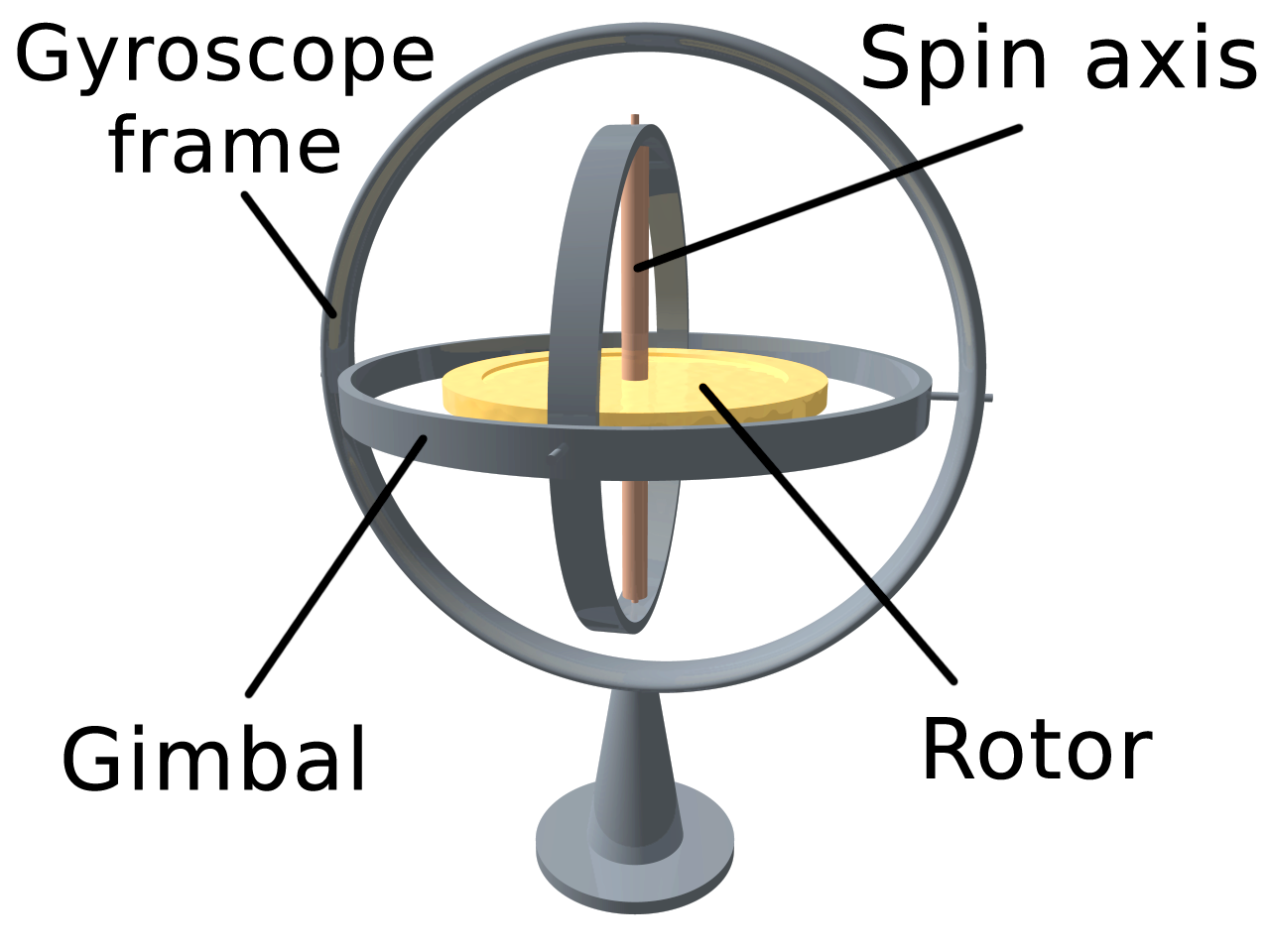
A gyroscope is a device that has the ability to measure and calculate angular acceleration based on its orientation. The angular acceleration can be calculated due to the structure of the gyroscope. Similar to the accelerometer volts are read when the internal parts of the gyroscope are displaced. However the structure varies from a basic accelerometer. There are disk and wheels whose axis is free to take up any orientation. For example if a force is felt on the positive x axis then the disk will rotate clockwise. This is important because due to the object that this robot will be balancing on, there are endless possibilities of motion.
The issue of the Accelerometer is that it lacks the precision and data that a gyroscope has in addition the gyroscope has an issue with calibration. By combining these two devices one could eliminate the issue of accuracy in data.
No comments:
Post a Comment